



Build Your Autonomous Car!
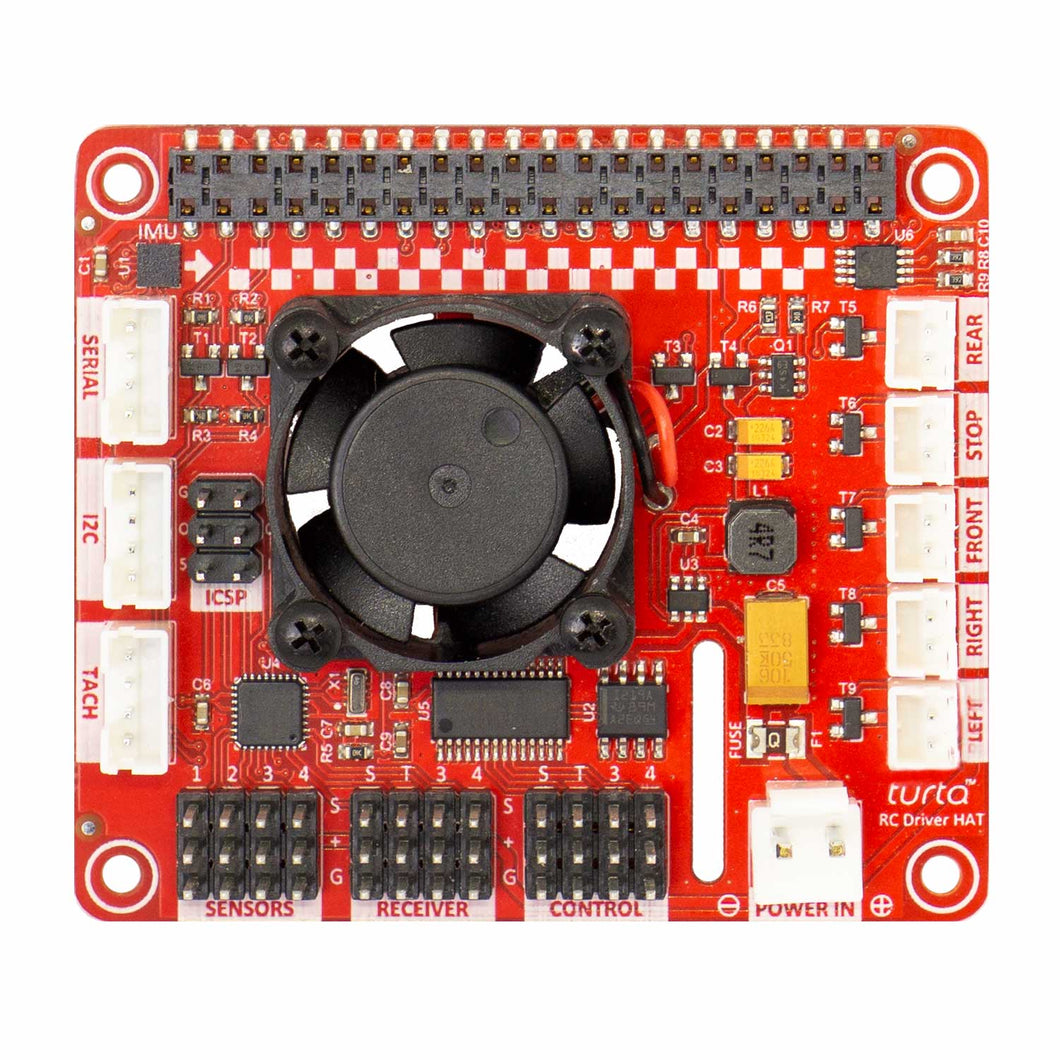
RC Driver HAT is a Raspberry Pi interface board for making autonomous RC vehicles. You can control ESCs, servo motors, LED lighting; connect sensors, decode receiver pulses, and much more to digitize your RC vehicle. It combines everything needed for controlling RC vehicles using Python!
Features
- The board takes control of your RC car via its 4Ch PWM output. It's compatible with most ESCs and RC servos.
- With RC Driver HAT's 4Ch analog inputs, your car detects its surroindings if you connect distance sensors to it.
- Connect RC remote controller via 4Ch PWM decoder for manual control.
- Decorate your RC car with LEDs using RC Driver HAT's 5Ch MOSFETs.
- Maintain 3D orientation and measure the 3D acceleration of your car using the on-board IMU.
- Measure speed and wheel RPM of your car using 2Ch tachometer inputs.
- Raspberry Pi can become hot while dealing with image processing. Cool it down with the onboard fan.
- Power your Raspberry Pi with 2 to 6 Cell Li-Po or equivalent battery. RC Driver HAT monitors the battery Voltage. Its high-efficiency switching power supply uses a minimum amount of battery.
- Connect external sensors, displays, or GPS using Grove System compatible I2C and UART ports.
- The board carries ID EEPROM for Raspberry Pi HAT specification compliance.
Documentation
RC Driver HAT comes with rich documentation located at docs.turta.io/raspberry-pi-hats/rc-driver-hat address.
Technical Specifications
RC Driver HAT provides the following devices and connectivity options:
- ST LSM6DS33 3D Accelerometer and 3D Gyroscope
- Measures 3D acceleration, pitch, roll, yaw, and internal temperature.
- Acceleration Range: Up to +/-16 g full scale.
- Angular Rate Range: Up to +/- 2000 dps full scale.
- Data Rate: Up to 1.6 kHz.
- NXP PCA9685 PWM Driver
- This driver produces pulses for 4 CH RC control, 5 CH LED driver and CPU fan.
- PWM Frequency: Set to 60 Hz, suitable for RC vehicle equipment.
- Control Port Pulses: 4 Ch, 1000us to 2000us pulse generation.
- LED Driver Pulses: 5 Ch, 0% to 100% duty cycle.
- CPU Fan Driver Pulses: 0% to 100% duty cycle.
- TI INA219 Voltage Monitor
- This device measures battery power from the 'Power In' port.
- Voltage Range: 0 to 26 V.
- Resolution: 0.004 V, 128 Samples.
- ATmega328PB Microcontroller
- The MCU decodes 4 Ch PWM pulses from RC remote receiver, reads 4 Ch analog inputs and counts RPM from the 2 Ch tachometers.
- PWM Decoding: 4Ch, 500us to 2500us pulse range, 4us resolution.
- Analog Inputs: 4Ch, 0V to 5V, 10-bits, 1024 steps.
- Tachometer Inputs: 2Ch, 10.000rpm max.
- I/O Ports
- RC Driver HAT has 2 Grove System compatible ports.
- Serial Port: Provides RX, TX, 3.3V and GND pins for UART (serial) communication. Useful for adding GPS or GSM devices.
- I2C Port: Provides SCL, SDA, 3.3V and GND pins for I2C and SMBus communications. Useful for adding more sensors or motor drivers.
Component Datasheets
You can find IoT HAT's major component datasheets at our GitHub repository.
Samples
We have jump-start samples for each functionality. They are available on our GitHub repository. Their step by step guide is available on our documentation.
Easy Library Installation
It's easy to install RC Driver HAT's Python 3 drivers just with "pip3 install turta-rcdriverhat" command.
RC Car Chassis
We designed a 3D printable, modular RC car chassis that carries Raspberry Pi, RC Driver HAT, Pi camera, and proximity sensors. It's available on Thingiverse.
Open-Source Libraries
Our libraries are open-sourced and available at github.com/Turta-io/RCDriverHAT repository.
Community
Feel free to join our community forums to share your projects and get ideas. IoT HAT's dedicated category page is at community.turta.io/c/raspberry-pi/rc-driver-hat address.